Technical Challenge
Soft robots, which typically consist of rubber-like materials, rely on their inherent compliance and finite deformations to achieve a desired performance and are therefore excellent candidates for applications that involve robot-human interactions and operations on delicate and sensitive objects. Since the functionality of soft robots is closely related to their ability to deform and conform, it is of great importance for the user and designer to be able to predict their deformation upon actuation.
However, the analysis of soft robots and their interactions using finite element analysis (FEA) is challenging, mainly due to contact and finite deformations. Veryst, with its extensive FEA experience and rich material library (PolyUMod® — now available through PolymerFEM.com) is very well equipped to perform such studies on soft robots, as this case study demonstrates.
Veryst Solution
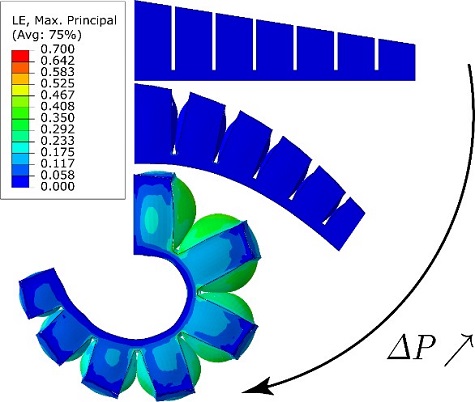
We developed an Abaqus model to simulate and assess the real-time performance of a soft fluidic gripper consisting of four fluidic bending actuators (FBAs). Snapshots of the strain field corresponding to the inflation of a single fluidic bending actuator are shown in Figure 1.
The Abaqus model, whose isometric view is shown in Figure 2, accounts for four FBAs positioned at 90° angles with one another and at a 60° angle to the horizontal (floor), as well as the soft object to be carried (see Figure 2).
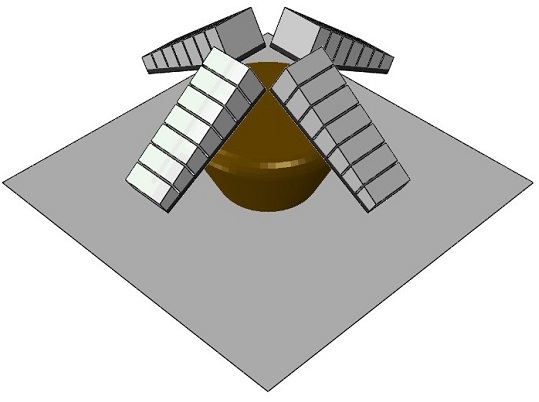
We performed finite element simulations to assess the capability of the soft fluidic gripper to grasp, lift, and safely carry the very soft object (see Figure 2) without damaging it in dynamic loading conditions.
To establish a grip on the object, the actuators were inflated to 230kPa in 2 seconds. Subsequently, with all four actuators engaged, the object was lifted 100mm above the floor (duration of lift is 1 second) and then rotated 30° with respect to the floor (duration of rotation is 2 seconds).
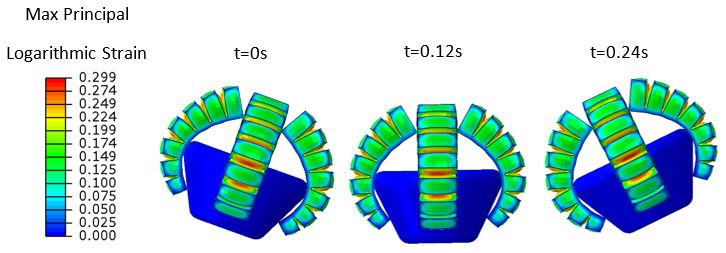
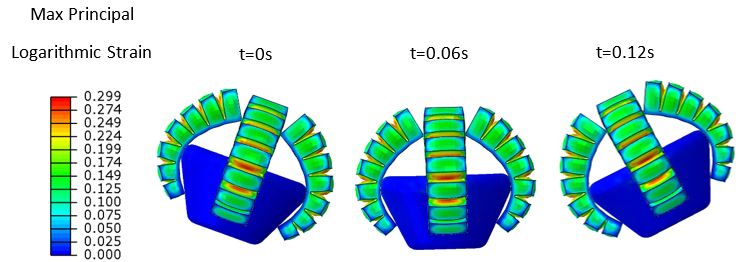
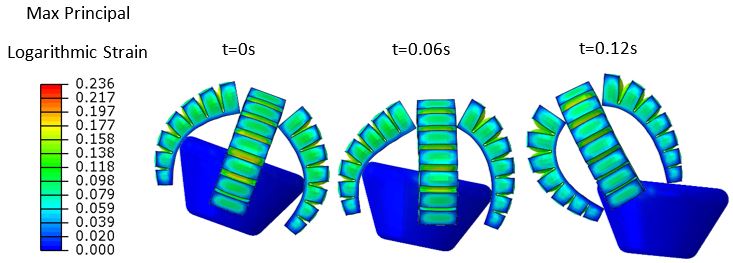
The ability of the gripper to carry the objects safely was assessed by applying a sinusoidal rotational velocity profile with a frequency of 1,2 and 4Hz, emulating the shaking of the gripper. The gripper can safely carry the soft object as demonstrated by the shaking tests for both the 2Hz (see Figure 3) and 4Hz (see Figure 4) cases. The object always remains perfectly attached to the gripper and there is almost no relative motion between the gripper and the object.
To determine the conditions in which the revolved/tapered object could not be safely carried by the gripper, we inflated the actuators to a lower pressure (150kPa vs 230kPa from the prior tests). The results indicate that if the pressurization of the actuators is not enough for them to exert a reasonable force on the object, then the object will quickly lose contact with the gripper (see Figure 5).
Conclusions
Veryst Engineering can successfully assess the capability of soft robotic grippers to lift and carry safely delicate soft objects of various shapes and sizes. Veryst can further identify the design criteria that a soft fluidic gripper must meet to perform properly.