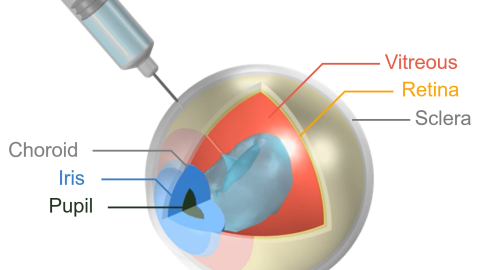
A cornerstone for ophthalmic therapy, intravitreal injection must overcome unique challenges: ensuring patient comfort, safeguarding delicate retinal tissues, and delivering medication accurately to specific intraocular targets. Key design metrics—including injectate volume, dispersion, injection force, needle gauge, and intraocular pressure rise—must be precisely optimized. In this case study, Veryst leverages multiphysics CFD simulation to predict, manage, and enhance device safety and performance for innovative ocular drug delivery.